các phương trình động lực học của hệ thống amb

Đề xuất phương pháp điều khiển phản hồi đầu ra LQG cho ổ đỡ từ bốn bậc tự do
Ngày tải lên :
15/08/2015, 15:49
... Bearings - AMBs) 1.3.2.1 Cỏc cu trỳc c bn ca AMB 1.3.2.2 H truyn ng s dng AMB 1.3.2.3 Truyn ng khụng tip xỳc 1.4 Nhng c trng c bn v ng dng ca h thng AMB
6 1.4.1 Nhng c trng c bn ca AMB - Khụng ... x x0 x0 (2.16) Hỡnh 4: Ch vi sai ca AMB Khi h thng ca AMB c xem xột gm hai b AMB1 v AMB2 b trớ ti hai phớa, ta s cú lc hp dn Fx1 v Fx theo phng x ca hai b AMB ny Cỏc lc ny c biu din c th nh sau: ... phng trỡnh ng lc hc ca h thng AMB 2.5.1 Cu trỳc ca b AMB c kho sỏt Hỡnh 2.8 minh cu trỳc ca mt h thng AMB c la chn tin hnh kho sỏt Theo cu trỳc ny, h thng bao gm b AMB c b trớ hai u ca ng c Phn...
- 28
- 620
- 0

Tính điều khiển được hoàn toàn của hệ thống tuyến tính qua một cách tiếp cận hình học
Ngày tải lên :
29/06/2014, 22:55
... thu hai hệ thú vị sau Hệ Cho (A, Ω) điều khiển địa phương Khi tập tiếp cận R hệ chứa đường cong nghiệm hệ tự x ∈ Ax, t ≥ 0, cho bị chặn vô ˙ Bổ sung thêm giả thiết ∈ coΩ Khi R lồi ta có: Hệ Giả ... Vậy chứng minh bổ đề hoàn tất Các kết Rõ ràng tính điều khiển địa phương hệ (A, Ω) điều kiện cần để có tính điều khiển hoàn toàn hệ Điều kiện cho tính điều khiển địa phương thiết lập nhiều báo trước ... Một hệ khác Định lí ta có cách kiểm tra tính điều khiển hoàn toàn [3], không nhắc đến Cr (Ω) Cb (Ω) Hệ Cho Ω tập tùy ý với ∈ coΩ Hệ (A, Ω) điều khiển hoàn toàn (a) (A, Ω) điều khiển địa phương; ...
- 10
- 467
- 0

Báo cáo đồ án trí tuệ nhân tạo: Xây dựng chương trình mô tả không gian trạng thái của toán chiếc balô loại 2 giải quyết theo giải thuật Gene với phương pháp chọn Rank
Ngày tải lên :
25/03/2014, 22:03
... quần thể (population) tiến hóa từ hệ tới hệ khác phụ thuộc vào thích nghi cá thể Thế hệ sinh chứa lời giải toán • Giải thuật: - Khởi tạo quần thể P(0) - số i hệ thứ i - Lặp đến quần thể hội tụ ... ngành khoa học máy tính, tìm kiếm lời giải tối ưu cho toán vấn đề nhà khoa học máy tính đặc biệt quan tâm Mục đích thuật toán tìm kiếm lời giải tìm lời giải tối ưu cho toán thời gian nhỏ Các thuật ... Thanh Huyền – TH5A Bài tập lớn môn trí tuệ nhân tạo Không có trình kết thúc Quá trình tiến hóa dừng lại sau khoảng tgian quy định(một số hệ) sau hội tụ (không thể tìm thêm cá thể tốt hơn) II Bài...
- 10
- 1.3K
- 4

Báo cáo đồ án trí tuệ nhân tạo: Mô tả không gian trạng thái bài toán người đưa thư (Travelling Saleman Problem – PST) và dùng giải thuật Local Search để giải quyết
Ngày tải lên :
25/03/2014, 22:18
... chương trình: Do chương trình viết thời gian ngắn mang tính chất mô thuật toán nên nhiều hạn chế mặt lâp trình Giao diện phức tạp Chương trình chạy tốn nhớ - Cuối thiếu kinh nghiệm lập trình hạn ... lần, khoảng cách từ thành phố đến thành phố khác xác định Hãy tìm chu trình (một đường khép kín thỏa mãn điều kiện trên) cho tổng độ dài cạnh nhỏ III-Giao diện chương trình: Chương trình thiết ... - Khởi tạo số thành phố - Khai báo mảng chiều a(i, j) để lưu khoảng cách thành phố với i j số thành phố - Nhập liệu (khoảng cách) cho mảng - Chọn điểm xuất phát s - Xét giá trị mảng a(s, j): •...
- 11
- 1.5K
- 3

DẠNG CHÍNH tắc của mô HÌNH KHÔNG GIAN TRẠNG THÁI
Ngày tải lên :
16/10/2015, 10:27
... KGTT hệ thống So sánh ma trận A, B, C, D vừa tìm với ma trận A, B, C, D cho (bằng cách dùng lệnh tf(sys), với sys mô hình KGTT hệ thống) Nếu khác, kiểm tra lại việc xác định hàm truyền hệ thống ... -8.882e-015 s^2 + 30 s + 30 s^3 + 10 s^2 + 31 s + 30 Nhận xét: Ta thấy hệ số A1,B1,C1 khác với hệ số A,B,C,D 3.Hãy tìm dạng tắc lệnh canon Hãy so sánh với dạng tắc quan sát >> csys=canon(G2) ... phải ma trận, dạng tắc đường chéo phần tử nằm đường chéo matran 4.Hãy tìm dạng tắc điều khiển hệ thống từ dạng tắc quan sát >> A2=[0 -30;1 -31;0 -10] A2 = 0 -30 -31 -10 >> B2=[1;0;0] B2 = 0 >>...
- 11
- 259
- 0

THIẾT lập mô HÌNH KHÔNG GIAN TRẠNG THÁI
Ngày tải lên :
16/10/2015, 10:36
... 1.1200 d.Tìm đáp ứng step hệ hồi tiếp vừa xác định >> step(GT) g.Trong simulink, vẽ sơ đồ khối chi tiết mô hình không gian biến trạng thái từ hệ phương trình trạng thái hệ hồi tiếp vừa chọn Mô ... 2*s^2/(s^3+8*s^2+16*s+16)+8*s/(s^3+8*s^2+16*s+16)+6/(s^3+8*s^2+16*s+16) e.Vẽ quỹ đạo nghiệm số hệ hồi tiếp âm đơn vị Chọn cặp cực liên hiệp phức tùy ý Xác định giá trị K cặp cực chọn để tìm hàm truyền hệ hồi tiếp có cực chọn (dùng lệnh feedback) ... d= u1 x2 x3 0.25 0.09375 y1 d.Tìm ma trận A, B, C, D mô hình KGTT từ véctơ hệ số tử mẫu hàm truyền T(s) Kiểm tra lại cách áp dụng công thức: H ( s ) = C ( sI − A ) B + D = −1 det ( sI − A + BC...
- 10
- 1.7K
- 1

Báo cáo đồ án trí tuệ nhân tạo: Mô tả không gian trạng thái trò chơi cờ tướng theo giải thuật minimax
Ngày tải lên :
25/03/2014, 22:26
... sót Rất mong giúp đỡ tận tình Thầy để chương trình em hoàn thiện Em xin chân thành cảm ơn Thầy! Chương trình: I) Giao diện: II) Các hàm sử dụng chương trình: Mỗi quân cờ ta phải lưu tọa độ, tên ... hành hai đấu thủ, người cầm quân đỏ, người cầm quân đen Mục đích đấu thủ tìm cách quân bàn cờ luật để chiếu tướng đối phương giành thắng lợi Bàn cờ hình chữ nhật đường dọc 10 đường ngang cắt vuông ... đầu có bán kính 30 cm Vì kích vào điểm bàn cờ, hàm KiemTra tính toán khoảng cách tọa độ chuột tọa độ điểm gần Nếu khoảng cách điểm với tọa độ chuột nhỏ bán kính quân cờ di chuyển quân cờ vị trí...
- 14
- 1.1K
- 9

Báo cáo nghiên cứu khoa học " Thiết lập bộ mô hình mô phỏng phục vụ xây dựng quy trình vận hành hệ thống liên hồ chứa thủy điện trên lƣu vực sông Ba " docx
Ngày tải lên :
20/06/2014, 00:20
... quy trình vận hành liên hồ chứa hệ thống sông Hồng [8] Vận hành cửa van hệ thống hồ chứa sông Ba để cắt lũ phức tạp Các cửa đƣợc mở theo nấc 0.5 m, cửa đƣợc mở từ Hết chu trình mở tiếp nấc Các ... N.T Giang / Tạp chí Khoa học ĐHQGHN, Khoa học Tự nhiên Công nghệ 27, Số 1S (2011) 136-150 2.2 Mô đun điều hành hệ thống hồ chứa Mô đun đƣợc sử dụng để điều hành hồ chứa hệ thống sông Hồng mùa lũ, ... thành công chủ yếu gắn liền với đặc thù hệ thống, phƣơng pháp luận, công cụ dùng chung cho hệ thống Có thể tóm tắt phƣơng pháp xây dựng quy trình vận hành hệ thống hồ chứa nhóm: mô phỏng, tối ƣu...
- 15
- 696
- 0

MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC
Ngày tải lên :
14/10/2013, 16:29
... n: bậc hệ thống, hệ thống hợp thức n m ai, bi: thông số hệ thống 26 September 2006 © H T Hồng - ÐHBK TPHCM Một số thí dụ mô tả hệ thống phương trình vi phân Thí dụ 2.1: Đặc tính động học tốc ... nào!!!.) Thiết kế hệ thống dựa vào phương trình vi phân thực trường hợp tổng quát Cần dạng mô tả toán học khác giúp phân tích thiết kế hệ thống tự động dể dàng Ø Hàm truyền Ø Phương trình trạng thái ... phần tử Hàm truyền hệ thống tự động Ø Đại số sơ đồ khối Ø Sơ đồ dòng tín hiệu Phương trình trạng thái (PTTT) Ø Khái niệm PTTT Ø Cách thành lập PTTT từ phương trình vi phân Ø Quan hệ PTTT hàm truyền...
- 98
- 725
- 1

Tài liệu MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐỊNH VỊ ĐỘNG HỌC TÀU THỦY pdf
Ngày tải lên :
14/12/2013, 01:17
... hình ( – ) xuất ma trận hệ số K ma trận T xem biết Đặc tính động lực học thiết bị đẩy: Đặc tính động lực học thiết bị đẩy mô hình hoá phương trình vi phân: ( – 10 ) Với tcom lực đẩy yêu cầu Athr ... thiểu hóa số thực hiện: 7.2 Sự phân phối lực đẩy hệ thống định vị động học: Sự phân phối lực đẩy liên quan đến việc tính toán tín hiệu điều khiển thiết bị đẩy phương thức tối ưu cho ( – ) thỏa mãn ... mômen quán tính quanh trục z; m khối lượng thân tàu; xGlà toạ độ Tính phi tuyến phương trình động học loại bỏ cách chọn hệ trục tọa độ trái đất cho hướng yêu cầu yd= Vì vậy, ta lấy xấp xỉ: ( – 12...
- 10
- 888
- 9

LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG - CHƯƠNG 2 MÔ HÌNH TOÁN HỌC - HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC doc
Ngày tải lên :
26/07/2014, 06:21
... dt n: bậc hệ thống, hệ thống hợp thức n m ai, bi: thông số hệ thống February 2006 © H T Hồng - ÐHBK TPHCM Một số thí dụ mô tả hệ thống phương trình vi phân Thí dụ 2.1: Đặc tính động học tốc độ ... nào!!!.) Thiết kế hệ thống dựa vào phương trình vi phân thực trường hợp tổng quát Cần dạng mô tả toán học khác giúp phân tích thiết kế hệ thống tự động dể dàng Ø Hàm truyền Ø Phương trình trạng thái ... phần tử Hàm truyền hệ thống tự động Ø Đại số sơ đồ khối Ø Sơ đồ dòng tín hiệu Phương trình trạng thái (PTTT) Ø Khái niệm PTTT Ø Cách thành lập PTTT từ phương trình vi phân Ø Quan hệ PTTT hàm truyền...
- 98
- 1.1K
- 10

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
Ngày tải lên :
07/08/2014, 23:24
... n: bậc hệ thống, hệ thống hợp thức n≥m ai, bi: thông số hệ thống 26 September 2006 © H T Hồng - ÐHBK TPHCM Một số thí dụ mô tả hệ thống phương trình vi phân Thí dụ 2.1: Đặc tính động học tốc ... nào!!!.) Thiết kế hệ thống dựa vào phương trình vi phân thực trường hợp tổng quát ⇒ Cần dạng mô tả toán học khác giúp phân tích thiết kế hệ thống tự động dể dàng Hàm truyền Phương trình trạng thái ... số phần tử Hàm truyền hệ thống tự động Đại số sơ đồ khối Sơ đồ dòng tín hiệu Phương trình trạng thái (PTTT) Khái niệm PTTT Cách thành lập PTTT từ phương trình vi phân Quan hệ PTTT hàm truyền 26...
- 10
- 807
- 9

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
Ngày tải lên :
07/08/2014, 23:24
... thông số hệ thống Do dùng hàm truyền để mô tả hệ thống 26 September 2006 © H T Hồng - ÐHBK TPHCM 17 Hàm truyền phần tử Cách tìm hàm truyền Bước 1: Thành lập phương trình vi phân mô tả quan hệ vào ... quan hệ vào – phần tử cách: Áp dụng đònh luật Kirchoff, quan hệ dòng–áp điện trở, tụ điện, cuộn cảm,… phần tử điện Áp dụng đònh luật Newton, quan hệ lực ma sát vận tốc, quan hệ lực biến dạng lò xo,… ... cần học thuộc biến đổi Laplace hàm Các hàm khác tra BẢNG BIẾN ĐỔI LAPLACE phụ lục sách Lý thuyết Điều khiển tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 15 Đònh nghóa hàm truyền Xét hệ thống...
- 10
- 706
- 7

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
Ngày tải lên :
07/08/2014, 23:24
... tượng thường gặp (tt) Hệ thống giảm xóc ô tô, xe máy M: khối lượng tác động lên bánh xe, B hệ số ma sát, K độ cứng lò xo f(t): lực xóc y(t): dòch chuyển thân xe Phương trình vi phân: dy (t ) ... TPHCM 28 Hàm truyền đối tượng thường gặp (tt) Xe ô tô M: khối lượng xe B hệ số ma sát f(t): lực kéo v(t): tốc độ xe Phương trình vi phân: Hàm truyền: với 26 September 2006 dv (t ) M + Bv (t ) = ... gặp Hàm truyền động DC − Lư : điện cảm phần ứng − Rư : điện trở phần ứng − : điện áp phần ứng − : sức phản điện động 26 September 2006 − ω : tốc độ động − Mt : moment tải − B : hệ số ma sát −...
- 10
- 1.1K
- 15

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
Ngày tải lên :
07/08/2014, 23:24
... 32 Hàm truyền hệ thống tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 33 Đại số sơ đồ khối Sơ đồ khối Sơ đồ khối hệ thống hình vẽ mô tả chức phần tử tác động qua lại phần tử hệ thống Sơ đồ khối ... Hàm truyền hệ thống đơn giản (tt) Hệ thống nối tiếp n Gnt ( s ) = ∏ Gi ( s ) i =1 26 September 2006 © H T Hồng - ÐHBK TPHCM 35 Đại số sơ đồ khối Hàm truyền hệ thống đơn giản (tt) Hệ thống song ... 26 September 2006 © H T Hồng - ÐHBK TPHCM 36 Đại số sơ đồ khối Hàm truyền hệ thống đơn giản (tt) Hệ thống hồi tiếp âm Hệ thống hồi tiếp âm đơn vò G(s) Gk ( s ) = + G ( s ).H ( s ) 26 September...
- 10
- 780
- 8

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
Ngày tải lên :
07/08/2014, 23:24
... Đại số sơ đồ khối Các phép biến đổi tương đương sơ đồ khối Chuyển tổng từ phía trước phía sau khối: 26 September 2006 © H T Hồng - ÐHBK TPHCM 42 Đại số sơ đồ khối Các phép biến đổi tương ... ÐHBK TPHCM 43 Đại số sơ đồ khối Các phép biến đổi tương đương sơ đồ khối Chuyển vò trí hai tổng: 26 September 2006 © H T Hồng - ÐHBK TPHCM 44 Đại số sơ đồ khối Các phép biến đổi tương đương sơ ... September 2006 © H T Hồng - ÐHBK TPHCM 46 Đại số sơ đồ khối Thí dụ Tính hàm truyền tương đương hệ thống có sơ đồ khối sau: 26 September 2006 © H T Hồng - ÐHBK TPHCM 47 Đại số sơ đồ khối Bài giải...
- 10
- 1K
- 8
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
Ngày tải lên :
07/08/2014, 23:24
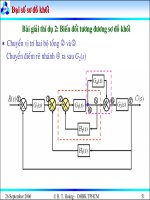
... đại số, hệ thống phức tạp phép tính hay bò nhầm lẫn ⇒ Phương pháp biến đổi tương đương sơ đồ khối thích hợp để tìm hàm truyền tương đương hệ thống đơn giản Đối với hệ thống phức tạp ta có phương ... đồ khối Một số nhận xét Phương pháp biến đổi sơ đồ khối phương pháp đơn giản Khuyết điểm phương pháp biến đổi sơ đồ khối không mang tính hệ thống, sơ đồ cụ thể có nhiều cách biến đổi khác nhau, ... 55 Đại số sơ đồ khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối Hàm truyền tương đương hệ thống: G2G3 + G3 H1 G1 G1GE + G2 H + G2G3 H + G3 H1H * Gtd = = G2G3 + G3 H1 + G1GE + G 1 + G2...
- 10
- 624
- 8

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
Ngày tải lên :
07/08/2014, 23:24
... nút đích hệ thống tự động biểu diễn sơ đồ dòng tín hiệu cho bởi: G = ∑ ∆ k Pk ∆ k 26 September 2006 © H T Hồng - ÐHBK TPHCM 63 Sơ đồ dòng tín hiệu Thí dụ Tính hàm truyền tương đương hệ thống có ... Đònh thức sơ đồ dòng tín hiệu: ∆ = − ( L1 + L2 + L3 + L4 ) + L1L2 Các đònh thức con: ∆1 = ∆2 = ∆ = − L1 Hàm truyền tương đương hệ thống: Gtd = ( P ∆1 + P2 ∆ + P3∆ ) ∆ Gtd = G1G2G3G4G5 + G1G6G4G5 ... Thí dụ (tt) Đònh thức sơ đồ dòng tín hiệu: ∆ = − ( L + L + L + L + L ) Các đònh thức con: ∆1 = ∆2 = Hàm truyền tương đương hệ thống: Gtd = ( P ∆1 + P2 ∆ ) ∆ G1G2G3 + G1G3 H1 Gtd = + G2 H + G2G3...
- 10
- 517
- 4

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
Ngày tải lên :
07/08/2014, 23:24
... ÐHBK TPHCM 73 Phương trình trạng thái Bằng cách sử dụng biến trạng thái, ta chuyển phương trình vi phân bậc n mô tả hệ thống thành hệ gồm n phương trình vi phân bậc nhất, (hệ phương trình trạng ... theo cách đặt biến trạng thái mà hệ thống mô tả nhiều phương trình trạng thái khác Nếu A ma trận thường, ta gọi (*) phương trình trạng thái dạng thường, A ma trận chéo, ta gọi (*) phương trình ... Phương trình trạng thái 26 September 2006 © H T Hồng - ÐHBK TPHCM 72 Trạng thái hệ thống Trạng thái: Trạng thái hệ thống tập hợp nhỏ biến (gọi biến trạng...
- 10
- 1.2K
- 13

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
Ngày tải lên :
07/08/2014, 23:24
... Cách thành lập PTTT từ PTVP Thí dụ trường hợp Viết PTTT mô tả hệ thống có quan hệ vào cho PTVP sau: && & 2&&&(t ) + 5c (t ) + 6c(t ) + 10c(t ) = r (t ) c Đặt biến trạng thái: Phương trình ... Viết PTTT mô tả hệ thống có quan hệ vào cho PTVP sau: && & 2&&&(t ) + c (t ) + 5c(t ) + 4c(t ) = &&(t ) + 3r (t ) c r Đặt biến trạng thái theo phương pháp tọa độ pha, ta phương trình trạng thái: ... 26 September 2006 © H T Hồng - ÐHBK TPHCM 87 Thành lập PTTT từ PTVP dùng phương pháp tọa độ pha Xét hệ thống mô tả phương trình vi phân dc(t ) d nc(t ) d n−1c(t ) + a1 + L + an−1 + anc(t ) = a0...
- 10
- 710
- 12
Tìm thêm:
- hệ việt nam nhật bản và sức hấp dẫn của tiếng nhật tại việt nam
- xác định các mục tiêu của chương trình
- xác định các nguyên tắc biên soạn
- khảo sát các chuẩn giảng dạy tiếng nhật từ góc độ lí thuyết và thực tiễn
- khảo sát chương trình đào tạo của các đơn vị đào tạo tại nhật bản
- khảo sát chương trình đào tạo gắn với các giáo trình cụ thể
- xác định thời lượng học về mặt lí thuyết và thực tế
- tiến hành xây dựng chương trình đào tạo dành cho đối tượng không chuyên ngữ tại việt nam
- điều tra đối với đối tượng giảng viên và đối tượng quản lí
- điều tra với đối tượng sinh viên học tiếng nhật không chuyên ngữ1
- khảo sát thực tế giảng dạy tiếng nhật không chuyên ngữ tại việt nam
- khảo sát các chương trình đào tạo theo những bộ giáo trình tiêu biểu
- nội dung cụ thể cho từng kĩ năng ở từng cấp độ
- xác định mức độ đáp ứng về văn hoá và chuyên môn trong ct
- phát huy những thành tựu công nghệ mới nhất được áp dụng vào công tác dạy và học ngoại ngữ
- mở máy động cơ lồng sóc
- mở máy động cơ rôto dây quấn
- các đặc tính của động cơ điện không đồng bộ
- hệ số công suất cosp fi p2
- đặc tuyến hiệu suất h fi p2