bài giảng diện chẩn điều khiển liệu pháp





Tài liệu Bài giảng: Kỹ thuật điều khiển tự động doc
Ngày tải lên :
16/12/2013, 03:15
...
4321
1
.G.G.GG1
G
−
.R
1
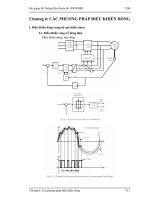
Hệ thống điều khiển bằng điện
Hệ thống điều khiển bằng dầu
Hệ thống điều khiển bằng khí ép
1.4.1. Các hệ thống điều khiển hở và hệ thống kín
a. Hệ thống điều khiển hở (Open- Loop ... THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
1.1 Các nội dung cơ bản
1.2 Mô hình diễn tả hệ thống điều khiển
1.3 Mô tả toán học các phần tử điều khiển cơ bản
1.4 Phân loại hệ thống điều khiển
1.4.1. Hệ thống điều khiển ... b. Hệ thống điều khiển kín
Khái niệm:
Hệ thống điều khiển kín là hệ thống mà tác động điều khiển phụ thuộc đáp ứng ra.
còn gọi là hệ thống điều khiển phản hồi.
E: Sai lệch điều khiển
E = R...
- 102
- 875
- 9

Tài liệu Bài giảng Hệ Thống Điều Khiển Số P5 doc
Ngày tải lên :
17/12/2013, 13:15
...
s
s
m
2
mrs
s
s
r
m
s
r
i
L
LLL
L
L
r
r
r
−
−ψ=Ψ
(5.1h)
()( )
2
r
2
rr
βα
Ψ+Ψ=Ψ
r
(5.1i)
VII. Đáp ứng điều khiển dộng cơ bằng FOC
Đáp ứng của bộ ước lượng từ thông rotor khi các thông số ĐCKĐB ba pha ... Bi ging H Thng iu Khin S
(CKB)
TâB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.1
Chương 5: MỘT SỐ PHƯƠNG PHÁP ƯỚC LƯỢNG
TỪ THÔNG ROTOR ĐCKĐB
I. Ước lượng từ thông rotor ... trước, moment tải bằng zero.
Bi ging H Thng iu Khin S
(CKB)
T
â
B
Chöông 5:
Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.9
KẾT QUẢ ĐO ĐẠC CỦA ĐỘNG CƠ C TIP DềNG
ã Dũng stator...
- 10
- 403
- 0
Tài liệu Bài giảng Hệ Thống Điều Khiển Số P6 docx
Ngày tải lên :
17/12/2013, 14:15
... phương pháp điều khiển dòng VI.3
II. Điều khiển dòng trong hệ qui chiếu từ thông rotor
Điều khiển dòng (dq), tiếp áp
III. Điều khiển áp
Điều khiển điện áp vòng hở
Phân biệt:
Điều khiển ...
Chöông 6: Các phương pháp điều khiển dòng VI.1
Chương 6: CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN DÒNG
I. Điều khiển dòng trong hệ qui chiếu stator
I.1. Điều khiển vòng trễ dòng điện
Điều khiển dòng, tiếp ... Thng iu Khin S
(CKB)
TâB
Chöông 6:
Các phương pháp điều khiển dòng VI.8
Ví dụ:
Điều khiển trực tiếp từ giá trị hồi tiếp:
Điều khiển gián tiếp từ giá trị đặt:
Bi ging H Thng...
- 10
- 448
- 0

Tài liệu Bài giảng hệ thống điều khiển số P4 docx
Ngày tải lên :
22/12/2013, 04:17
...
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.6
Bi ging H Thng iu Khin S
(CKB)
T
â
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.8
IV.3. Điều khiển gián tiếp
Điều khiển trực ... S
(CKB)
T
â
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.4
IV.2. Điều khiển trực tiếp
Điều khiển trực tiếp từ giá trị hồi tiếp đo về:
Điều khiển tiếp dòng:
Bi ging H ...
nghiệp dưới dạng thiết bị điều khiển hay thuật toán phần mềm.
e(t)
u(t)
PID
Đối tượng
điều khiển
c(t)
r(t)
Bi ging H Thng iu Khin S
(CKB)
TâB
Chöông 4
: Điều khiển định hướng từ thông...
- 13
- 447
- 0

Tài liệu Bài giảng hệ thống điều khiển số P7 ppt
Ngày tải lên :
22/12/2013, 04:17
... âTCB
Chng 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.6
III. Điều khiển không dùng cảm biến
(Sensorless Vector Control - SVC)
Sơ đồ cấu trúc hệ điều khiển định hướng từ thông rotor ...
Chng 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.1
Chương 7: MỘT SỐ PHƯƠNG PHÁP ƯỚC LƯỢNG
TỐC ĐỘ ĐỘNG CƠ ĐCKĐB
I. Các phương pháp ước lượng vận tốc vòng hở
I.1. Phương pháp 1
()
αββα
βα
α
β
β
α
ωωω
srsr
2
r
r
m
2
r
2
r
r
r
r
r
slr
ii
1
T
L
dt
d
dt
d
Ψ−Ψ
Ψ
−
Ψ+Ψ
Ψ
Ψ−
Ψ
Ψ
=−=
... Một số phương pháp ước lượng tốc độ TâB
Chng 7: Mt s phng phỏp c lng tc độ ĐCKĐB VII.8
Đáp ứng trên hệ thực:
Bi ging H Thng iu Khin S (CKB) âTCB
Chng 7: Một số phương pháp ước lượng...
- 8
- 336
- 0



Bài giảng hệ thống điều khiển số - Động cơ không đồng bộ 3 pha.pdf
Ngày tải lên :
20/08/2012, 09:57
...
Chương 4: Điều khiển định hướng từ thông (FOC) ĐCKĐB (6T)
Điều khiển PID
Điều khiển tiếp dòng.
Điều khiển tiếp áp.
Mô phỏng của FOC.
(21 tiết)
Chương 5:
Một số phương pháp ước ... FOC.
Chương 6: Các phương pháp điều khiển dòng (6T)
Điều khiển dòng trong HQC (αβ): vòng trễ và so sánh.
Điều khiển dòng trong HQC (dq).
Chương 7:
Một số phương pháp
ước lượng
tốc độ ... thành phần: i
sd
để điều
khiển từ thông rotor
r
ψ
r
, i
sq
để điều khiển momen quay T
e
, từ đó có thể điều khiển
tốc độ của động cơ.
(1.21a)
(1.21b)
Khi đó, phương pháp mô tả ĐCKĐB...
- 19
- 2.4K
- 11

Bài giảng Hệ Thống Điều Khiển Số P1
Ngày tải lên :
29/10/2013, 20:15
... U
x
và vector điện áp u
s
.
Bằng cách điều khiển chuyển đổi trạng thái đóng cắt các khóa của bộ nghịch lưu
thông qua T
1
, T
2
và T
0
, dễ dàng điều khiển
độ lớn
và
tốc độ quay
của vector ...
3
)1k(j
dck_phase
eU
3
2
U
π
−
= k = 1, 2, 3, 4, 5, 6
Bằng cách điều khiển chuyển đổi trạng thái đóng cắt các khóa của bộ nghịch lưu dễ
dàng điều khiển vector không gian điện áp “quay” thuận nghịch, nhanh ... U
BC
?
Bài tập 1.8.
Khi tăng tần số điều rộng xung (PWM) của bộ nghịch lưu, đánh giá tác
động của sóng hài bậc cao lên dòng điện động cơ. Phương pháp điều
khiển nào có tần số PWM luôn thay đổi?
...
- 9
- 473
- 2

Bài giảng môn học điều khiển mờ
Ngày tải lên :
06/11/2013, 08:15
... dây nhận áp điều khiển u.
Trang 297
Hình 4.21 : Dạng hàm thuộc để mờ hóa S
Chương 4 : Điều khiển mờ
Ta cần xác định luật điều khiển u sao cho S
→
0 để có x
→
0.
Đối với điều khiển bám ... nhau ở luật hợp thành)
Trang 261
Chương 4 : Điều khiển mờ
4.2.2. Nguyên lý điều khiển mờ
♦ Các bước thiết kế hệ thống điều khiển mờ.
+ Giao diện đầu vào gồm các khâu: mờ hóa và các khâu ... sử dụng bộ giám sát.
5. Điều khiển mờ trượt
1. Nguyên lý điều khiển trượt
Xét hệ thống phi tuyến
uXgXfx
n
)()(
)(
+=
(4.44)
y(t) = x(t)
trong đó u là tín hiệu điều khiển, x là tín hiệu ra,...
- 99
- 771
- 8

Bài giảng Hệ Thống Điều Khiển Số P3
Ngày tải lên :
09/11/2013, 05:15
... thành phần: i
sd
để điều
khiển từ thông rotor
r
ψ
r
, i
sq
để điều khiển momen quay T
e
, từ đó có thể điều khiển
tốc độ của động cơ.
()
()
Khi đó, phương pháp mô tả ĐCKĐB ba ... Cho phép xây dựng hệ thống điều chỉnh truyền động ĐCKĐB ba
pha tương tự như trường hợp sử dụng động cơ điện một chiề
u. Điều khiển tốc độ
ĐCKĐB ba pha ω thông qua điều khiển hai phần tử của dòng ...
trình (2.34d) trong chương II).
Phương trình trên cho thấy có thể điều khiển từ thông rotor
rrd
ψ=ψ
r
thông
qua điều khiển dòng stator i
sd
. Đặc biệt mối quan hệ giữa hai đại lượng này...
- 10
- 450
- 1

Bài giảng Hệ Thống Điều Khiển Số P4
Ngày tải lên :
09/11/2013, 05:15
... S
(CKB)
T
â
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.4
IV.2. Điều khiển trực tiếp
Điều khiển trực tiếp từ giá trị hồi tiếp đo về:
Điều khiển tiếp dòng:
Bi ging H ...
(CKB)
T
â
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.8
IV.3. Điều khiển gián tiếp
Điều khiển trực tiếp từ giá trị hồi tiếp - tiếp dòng:
Điều khiển gián tiếp từ giá trị đặt ... điều khiển hay thuật toán phần mềm.
e(t)
u(t)
PID
Đối tượng
điều khiển
c(t)
r(t)
Bi ging H Thng iu Khin S
(CKB)
T
â
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.3
II. Điều...
- 13
- 449
- 0