Đề cương ôn tập lý thuyết điều khiển tự động hệ đại học

Đề cương ôn tập lý thuyết điều khiển tự động hệ đại học
... Cho hệ thống điều khiển tự động có sơ đồ: a Phân tích tính ổn định hệ hở b Tìm K để hệ kín ổn định
87 88 Đáp án: a (1đ) hệ hở ổn định b (1đ) -5 < K < 6.5 Câu hỏi: Cho hệ thống điều khiển tự động ... tra tính điều khiển tính quan sát Đáp án: a (2đ) W ( s ) = C ( sI − A) −1 B 123 b (1đ) điều khiển được, quan sát Câu hỏi: Cho sơ đồ khối hệ thống điều khiển...

Đề cương ôn tập lý thuyết điều khiển tự động hệ đại học
... điều khiển tự động có sơ đồ: 87 a Phân tích tính ổn định hệ hở b Tìm K để hệ kín biên giới ổn định Đáp án: a (1đ) hệ hở biên giới ổn định b (1đ) K = 88 Câu hỏi: Cho hệ thống điều khiển tự động ... Cho hệ thống điều khiển tự động có sơ đồ: 86 IV IV 2 II, IV a Phân tích tính ổn định hệ hở b Tìm K để hệ kín ổn định Đáp án: 2 a (1đ) hệ hở ổn định b (1đ) -5...

Đề cương ôn tập lý thuyết điều khiển tự động hệ cao đẳng
... hệ b Tìm điều kiện K để hệ thống ổn định Đáp án: a (1.5đ) A( s ) = s + s + s + K + = b (1.5đ) -1

Đề cương lý thuyết điều khiển tự động hiện đại potx
... toán mềm 1.3 Giới thiệu điều khiển tối ưu Chöông : Ñieàu khieån mờ 2.1 Các khái khái niệm logic mờ 2.2 Bộ điều khiển mờ 2.3 Thiết kế điều khiển PID mờ 2.4 Thiết kế điều khiển mờ lai 2.5 Fuzzy ... Mạng truyền thẳng nhiều lớp 3.6 Điều khiển dùng mạng nơ rôn Bài tập Chöông : Điều khiển tối ưu 4.1 Chất lượng tối ưu 4.2 Các phương pháp điều khiển tối ưu 4.3 Điều khiể...

bài tập lý thuyết điều khiển tự động
... Bài 23: Trên đặc tính pha tần số góc pha thay đổi ảnh hưởng đến chế độ điều khiển? Bài 24: Trên đặc tính tần số biên độ logarit trục hoành thường dùng đơn vị đecac? Bài 25: Nếu trục ... biên độ logarit LH(ω) Bài 140: Hãy thành lập hàm truyền mạch điện có sơ đồ nguyên lý sau: Bài 141, 142: Hãy thành lập hàm truyền mạch điện có sơ đồ nguyên lý sau: - 12 - Bài 143, 144, 145: C...

Bài tập lý thuyết điều khiển tự động sử dụng matlab
... ta sử dụng hiệu chỉnh PID cho hệ thống Vẽ giản đồ Bode điều khiển PID Phân tích ảnh hưởng khâu P, D dựa giản đồ Bode Tính chọn tham số PID theo phương pháp sau: P: chọn Kp cho hệ bắt đầu dao động ... 80.7s σm = 23.3% Bài tập 2: Cho hệ thống hở có hàm truyền đạt Ta có đáp ứng hệ thống chưa thêm khâu hiệu chỉnh: Hình Ta có: Tr = 0.941s Ts = 0.342s σm = 4.15% ess=0.5 1) Người ta s...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 1 docx
... phi tuyến chia làm hai loại: Hệ phi tuyến liên tục Hệ phi tuyến rời rạc Nội dung môn học đề cập đến hệ phi tuyến liên tục 26 September 2006 © H T Hồng - ÐHBK TPHCM Tính chất hệ phi tuyến Hệ phi ... phi tuyến Hệ phi tuyến hệ thống quan hệ vào – mô tả phương trình vi phân/sai phân tuyến tính Phần lớn đối tượng tự nhiên mang tính phi tuy...
Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 2 ppt
... δ (t ) ) & τ τ & 2 2 2 (hệ phi tuyến bậc 3) 26 September 20 06 © H T Hồng - ÐHBK TPHCM 14 Mô tả toán học hệ phi tuyến dùng phương trình trạng thái Hệ phi tuyến liên tục mô tả phương ... ) 2 ( J + ml ) ( J + ml ) ( J + ml ) (hệ phi tuyến bậc 2) 26 September 20 06 © H T Hồng - ÐHBK TPHCM 13 Mô tả hệ phi tuyến dùng phương trình vi phân – T...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 3 pdf
... T Hồng - ÐHBK TPHCM 18 Phương pháp tuyến tính hóa 26 September 2006 © H T Hồng - ÐHBK TPHCM 19 Điểm dừng hệ phi tuyến & x (t ) = f ( x (t ), u (t )) Xét hệ phi tuyến mô tả PTTT phi tuyến: ... trạng thái x gọi điểm dừng hệ phi tuyến hệ trạng thái x với tác động điều khiển u cố đònh, không đổi cho trước hệ nằm nguyên trạng thái Nếu ( x , u ) điểm dừn...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 4 pdf
... September 2006 © H T Hồng - ÐHBK TPHCM 31 Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh Đưa hệ phi tuyến miền xung quanh điểm làm việc tónh (đơn giản dùng điều khiển ON-OFF) Xung quanh ... x2 = u = 1.2 744 Do điểm làm việc tónh cần xác đònh là: x1 π / 6 x= = x2 u = 1.2 744 26 September 2006 © H T Hồng - ÐHBK TPHCM 28 Tuyến t...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 5 doc
... Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID − ON-OFF u(t) Đối tượng phi tuyến y(t) Chọn ĐK Thuật toán điều khiển ON-OFF: Nếu e(t ) > emax ... September 2006 © H T Hồng - ÐHBK TPHCM 34 Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID u(t) Đối tượng phi tuyến − ON-OFF y(t) Chọn ĐK Thuật toán điều...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 6 docx
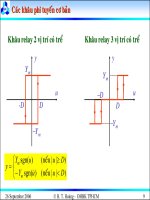
... = = 1− M πM M 26 September 20 06 © H T Hồng - ÐHBK TPHCM 46 Hàm mô tả khâu phi tuyến Khâu khuếch đại bão hòa ch 26 September 20 06 © H T Hồng - ÐHBK TPHCM 47 Hàm mô tả khâu phi tuyến Khâu khuếch ... 4Vm N (M ) = = M πM 26 September 20 06 © H T Hồng - ÐHBK TPHCM 44 Hàm mô tả khâu phi tuyến Khâu relay vò trí 26 September 20 06 © H T Hồng - ÐHBK TPHCM 45 Hàm...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 7 potx
... T Hồng - ÐHBK TPHCM D sin α = M 52 Khảo sát chế độ dao động hòa hệ phi tuyến Xét hệ phi tuyến có sơ đồ sau: r(t)=0 + − e(t) N(M) u(t) G(s) y(t) Điều kiện để hệ thống có dao động là: ... Hồng - ÐHBK TPHCM 54 Trình tự khảo sát chế độ dao động hệ phi tuyến B1: Xác đònh hàm mô tả khâu phi tuyến (nếu khâu phi tuyến khâu bản) B2: Điều kiện...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 8 ppsx
... tuyến có dao động y (t ) = 13.90 sin(1.58t ) 26 September 2006 © H T Hồng - ÐHBK TPHCM 58 Khảo sát chế độ dao động hệ phi tuyến - Thí dụ Xét hệ phi tuyến có sơ đồ sau: Hàm truyền khâu tuyến tính ... H T Hồng - ÐHBK TPHCM 61 Khảo sát chế độ dao động hệ phi tuyến - Thí dụ Do điều kiện (*) thỏa mãn khi: Vm 2Vm ≥ 0 .86 4 ≥ 0.55 ⇔ D πD Vậy điều kiện...

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 9 pot
... Đònh lý: Nếu hệ thống tuyến tính hóa (2) ổn đònh hệ phi tuyến (1) ổn đònh tiệm cận điểm cân xe Nếu hệ thống tuyến tính hóa (2) không ổn đònh hệ phi tuyến (1) không ổn đònh điểm cân xe Nếu hệ thống ... ε , ∀t ≥ © H T Hồng - ÐHBK TPHCM 69 Ổn đònh tiệm cận Lyapunov Cho hệ phi tuyến không kích thích mô tả PTTT: & x = f ( x , u ) u =0 (1) Giả sử hệ thống...
Từ khóa:
- bài tâp lý thuyết điều khiển tự động
- bài tập lý thuyết điều khiển tự động co dap an
- giai bai tap ly thuyet dieu khien tu dong
- đề thi giữa kỳ lý thuyết điều khiển tự động 1
- đề cương ôn tập lý thuyết hệ điều hành
- đề cương ôn tập lý thuyết mạch
- đề cương ôn tập lý thuyết toán 6
- đề cương ôn tập lý thuyết tài chính tiền tệ
- đề cương ôn tập lý thuyết thống kê
- đề cương ôn tập lý thuyết ô tô
- đề cương ôn tập lý thuyết kinh tế vĩ mô
- de cuong on tap ly thuyet cong nghe 8
- đề cương ôn tập lý thuyết nghề phổ thông tin 8
- đề cương ôn tập lý thuyết vật lý 9
- bài tập cơ sở lý thuyết điều khiển tự động
- Báo cáo thực tập tại nhà thuốc tại Thành phố Hồ Chí Minh năm 2018
- Báo cáo quy trình mua hàng CT CP Công Nghệ NPV
- Nghiên cứu sự hình thành lớp bảo vệ và khả năng chống ăn mòn của thép bền thời tiết trong điều kiện khí hậu nhiệt đới việt nam
- Nghiên cứu tổ chức chạy tàu hàng cố định theo thời gian trên đường sắt việt nam
- Biện pháp quản lý hoạt động dạy hát xoan trong trường trung học cơ sở huyện lâm thao, phú thọ
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- Giáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôit
- ĐỒ ÁN NGHIÊN CỨU CÔNG NGHỆ KẾT NỐI VÔ TUYẾN CỰ LY XA, CÔNG SUẤT THẤP LPWAN
- NGHIÊN CỨU CÔNG NGHỆ KẾT NỐI VÔ TUYẾN CỰ LY XA, CÔNG SUẤT THẤP LPWAN SLIDE
- Phối hợp giữa phòng văn hóa và thông tin với phòng giáo dục và đào tạo trong việc tuyên truyền, giáo dục, vận động xây dựng nông thôn mới huyện thanh thủy, tỉnh phú thọ
- Phát triển mạng lưới kinh doanh nước sạch tại công ty TNHH một thành viên kinh doanh nước sạch quảng ninh
- Nghiên cứu, xây dựng phần mềm smartscan và ứng dụng trong bảo vệ mạng máy tính chuyên dùng
- Nghiên cứu tổng hợp các oxit hỗn hợp kích thƣớc nanomet ce 0 75 zr0 25o2 , ce 0 5 zr0 5o2 và khảo sát hoạt tính quang xúc tác của chúng
- Nghiên cứu khả năng đo năng lượng điện bằng hệ thu thập dữ liệu 16 kênh DEWE 5000
- Định tội danh từ thực tiễn huyện Cần Giuộc, tỉnh Long An (Luận văn thạc sĩ)
- Tìm hiểu công cụ đánh giá hệ thống đảm bảo an toàn hệ thống thông tin
- Sở hữu ruộng đất và kinh tế nông nghiệp châu ôn (lạng sơn) nửa đầu thế kỷ XIX
- Quản lý nợ xấu tại Agribank chi nhánh huyện Phù Yên, tỉnh Sơn La (Luận văn thạc sĩ)
- Giáo án Sinh học 11 bài 14: Thực hành phát hiện hô hấp ở thực vật
- Giáo án Sinh học 11 bài 14: Thực hành phát hiện hô hấp ở thực vật